![]()
![]()
![]()
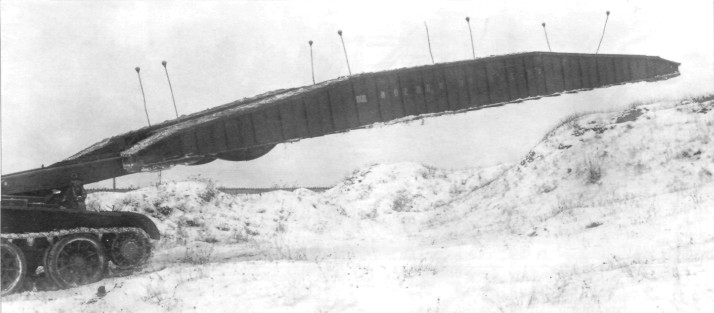
Наводка моста на вертикальное препятствие. Хорошо видны вешки-указатели, предназначенные для ориентирования водителей машин при прохождении по мосту.
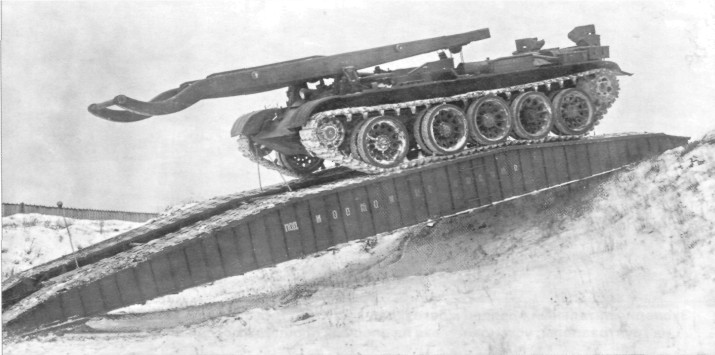
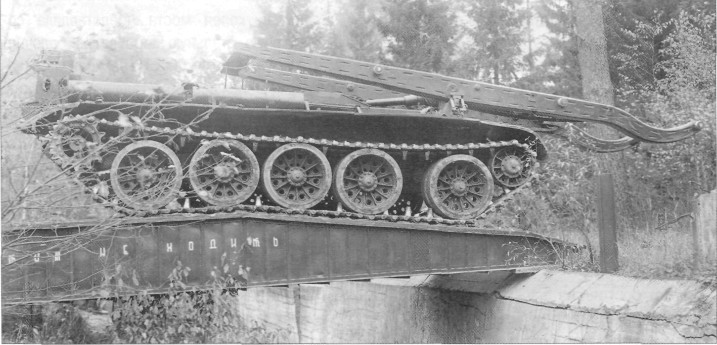
Мостоукладочная машина К-67 проходит по установленному мосту.
С целью предотвращения продольного сдвига моста при пропуске машин на опорных площадках его окончаний размешались грунтозацепы.
В транспортном положении мост располагался на шести несущих роликах, укрепленных на рычагах механизма наводки, и на двух поддерживающих кронштейнах в задней части корпуса. Крепление моста по-походному осуществлялось механизмом стопорения, буфера которого упирались в нижние пояса моста.
Для прохода по мосту колесных машин и артиллерии на его концах имелись съемные аппарели. На маршах они размещались в корме мостоукладочной машины.
Трансмиссия механизма установки моста. Как и в других машинах, разработанных под руководством А.Ф. Кравцева, основными частями агрегатов трансмиссии являлись готовые изделия, уже освоенные отечественной автотракторной промышленностью, включавшие сцепление и коробку скоростей, шарниры карданных валов и некоторые детали главной передачи грузового автомобиля ГАЗ-51, детали от артиллерийского тягача М-2, используемые в многодисковых фрикционах.
Трансмиссия механизма установки моста экспериментального образца К-67 состояла из механизма отбора мощности от гитары трансмиссии танка, главного карданного вала, коробки передач и сцепления, фрикционов и тормоза, главной передачи (заключенная в картер коническая пара ГАЗ-51), приводных цепей рычагов (механизма установки моста) и привода лебедки.
Механизм установки моста включал рычаги, приводные цепи, лебедку с червячным редуктором и полиспаст.
Рычаги были выполнены в виде двух сварных коробчатых балок, имеющих переменную высоту и жестко соединенных между собой двумя поперечными связями. Рычаги размещались на оси, смонтированной в двух кронштейнах, расположенных на передней части крыши корпуса машины. Ось поворота рычагов одновременно являлась валом главной передачи и ведущих звездочек приводной цепи движения моста. С внешней стороны рычаги имели по три несущих ролика, помещенных в швеллер моста, благодаря чему мост мог надвигаться на преграду.
Приводные цепи монтировались с внутренней стороны каждого рычага. Каждая цепь охватывала два ролика и ведущую звездочку. Передний ролик был установлен на кронштейне и служил для регулировки натяжения цепи, а задний ролик являлся направляющим. Между направляющим и натяжными роликами монтировался полоз, который поддерживал верхнюю ветвь цепи от провисания.
Лебедка располагалась на днище корпуса около моторного отделения и служила приводом к рычагу механизма установки моста на препятствие. Механизм лебедки состоял из червячного редуктора с тормозом (от ЗИС-151), барабана с фрикционом предельного момента, ролика, полиспаста и тягового троса.
Механизм стопорения моста по-походному состоял из двух передних и двух задних обрезиненных упоров, стопорящих мост при помощи гидравлической системы, оснащенной цилиндрами, служащими приводами для стопорения и расстопорения моста.
Стопорение и расстопорение (если не установлены фиксаторы) моста производилось механиком-водителем без выхода из машины.
Каждый упор представлял собой рычажный балансирно-шатунный механизм, развивавший наибольшее усилие на концах рычага, находящегося в мертвом положении. При стопорении моста рычаги переходили за мертвое положение и тем самым разгружали гидросистему от усилий.
На конце свободно перемещающегося рычага балансирно-шатунного механизма, в оправке, был закреплен резиновый буфер. В момент перехода рычагов балансирно-шатунного механизма через мертвое положение буфер упирался в мост, прижимая его к роликам рычагов и к задним опорам. Балансирно-шатунный механизм управлялся гидравлическими устройствами. Давление в гидравлической системе создавалось ручным насосом.
![]()
![]()
![]()