![]()
![]()
![]()
 |
 |
 |
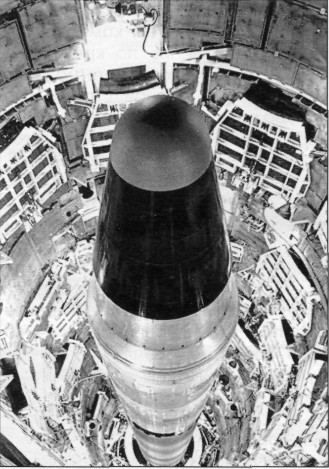
Ракета «Титан II» в пусковой шахте |
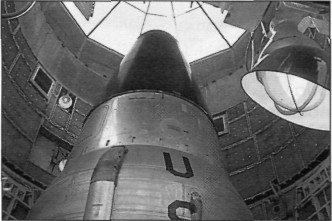
Головная часть ракеты «Титан II» |
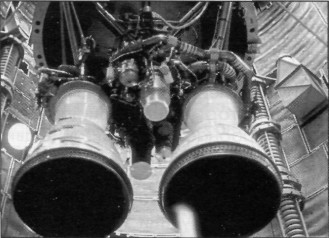
Двигатель первой ступени ракеты «Титан II» |

Утечка ядовитого окислителя на шахте «Титан II»
Пока в Америке шли горячие дебаты, в КБ Янгеля закончили первый эскизный проект двухступенчатой Р-16. Он представлял собой усеченный конус с диаметром основания 3,84 м и диаметром у вершины 1,7 м. Стартовый вес — 135 тонн. На ракету планировали установить двигатели серии СЗ, разработки конструктора Севрука из конструкторского бюро №3.
После выхода правительственного постановления о начале разработки Р-16 этот эскизный проект был полностью пересмотрен. Корпус ракеты стал обычным цилиндрическим. При этом расчетный стартовый вес нового изделия вырос на 15 тонн, но изготавливать такой корпус было проще. Для ускорения работы над проектом конструкторы пользовались готовыми техническим решениями, отработанными в ходе проектирования ракеты средней дальности Р-14.
Разработку двигателей перепоручили ОКБ-456, которое возглавлял В.П. Глушко. Он в достаточно сжатые сроки переработал конструкцию двухкамерного ЖРД 8Д513 и на его базе создал целое семейство двигателей: двухкамерный — 8Д713, четырехкамерный — 8Д514 и шестикамерный — 8Д712. Рулевые двигатели разрабатывало конструкторское бюро при Днепропетровском заводе, под руководством И.И. Иванова.
Важным отличием ракеты Р-16 от Р-7 стала ее полностью автономная система управления. Королевская ракета управлялась при помощи радиокоманд, которые передавались на борт из двух наземных пунктов, разнесенных на расстояние 500 км друг от друга и вынесенных на 276 км от стартовой позиции. Эти пункты должны были находиться на одной линии, перпендикулярной направлению стрельбы. Радиолокационные дальномеры, находящиеся на каждом пункте измеряли дальность до ракеты. На основе этих данных вычислялось боковое отклонение от заданной траектории и на борт Р-7 посылались соответствующие команды на поворот рулевых двигателей. Команда на выключение двигателей, при достижении заданной дальности, также вырабатывалась на земле и с одного из пунктов пересылалась на ракету.
Подобная система была громоздкой, не мобильной и легко выводилась из строя постановкой активных помех. Кроме того, она не могла одновременно управлять несколькими ракетами во время группового старта. Для боевой ракеты массового развертывания такая система не годилась. Независимую от земли, чисто инерциальную систему, Янгель предложил делать Н.А. Пилюгину, который уже разработал подобную систему для ракеты Р-12, но под влиянием Королева Пилюгин отказался от этой работы. Тогда Янгелю пришлось организовывать новое КБ на базе лаборатории Московского НИИ прикладной механики в Харькове. 11 апреля 1959 г. постановлением Совета министров такое КБ под номером 692 было сформировано и его руководителем назначили Б.М. Коноплева. В дальнейшем Харьковское ОКБ-692 трансформировалось в известный «Хартрон».
Главный конструктор ОКБ-586 М.Г. Янгель
Все эти организационные вопросы занимали достаточно много времени, а сроки поджимали. По заданию правительства ракета Р-16 должна была выйти на этап летно-конструкторских испытаний летом 1961 г. На нее уже были выданы тактико-технические требования и присвоен индекс Главного ракетно-артиллерийского управления — 8К64. Ведущим конструктором изделия назначили В.В. Грачева и его группа трудилась не покладая рук.
Основным конструкционным материалом для ракеты стал алюминиево-магниевый сплав. Для придания корпусу большей прочности он изнутри подкреплялся стрингерами и шпангоутами.
Первая ступень ракеты (длина — 14,5 м, диаметр — 3 м) состояла из двух баков с цилиндрическими корпусами и полусферическими днищами. Боковые стенки баков одновременно являлись элементами конструкции корпуса (схема с несущими топливными баками). Сверху стоял бак с окислителем, а снизу — с горючим. Внутри корпуса, между баками, крепились сферические баллоны со сжатым воздухом, который поддавливал горючее в полете. Окислитель поддавливался набегающим потоком воздуха, поступающим через специальные воздухозаборники.
Двигатель первой ступени типа РД-218 имел три блока по две камеры сгорания в каждом. Тяга двигателя на земле — 246 т. Вес двигателя 1960 кг. Управление ракетой в полете осуществлялось при помощи четырехкамерного ЖРД с поворотными соплами и тягой на земле 29 т. Сопла рулевых двигателей выходили за общий диаметр ступени и прикрывались коробчатыми обтекателями. Подача топлива в двигатели обеспечивалась турбонасосными агрегатами, работающими на газе от сгорания основного топлива.
![]()
![]()
![]()