![]()
![]()
![]()
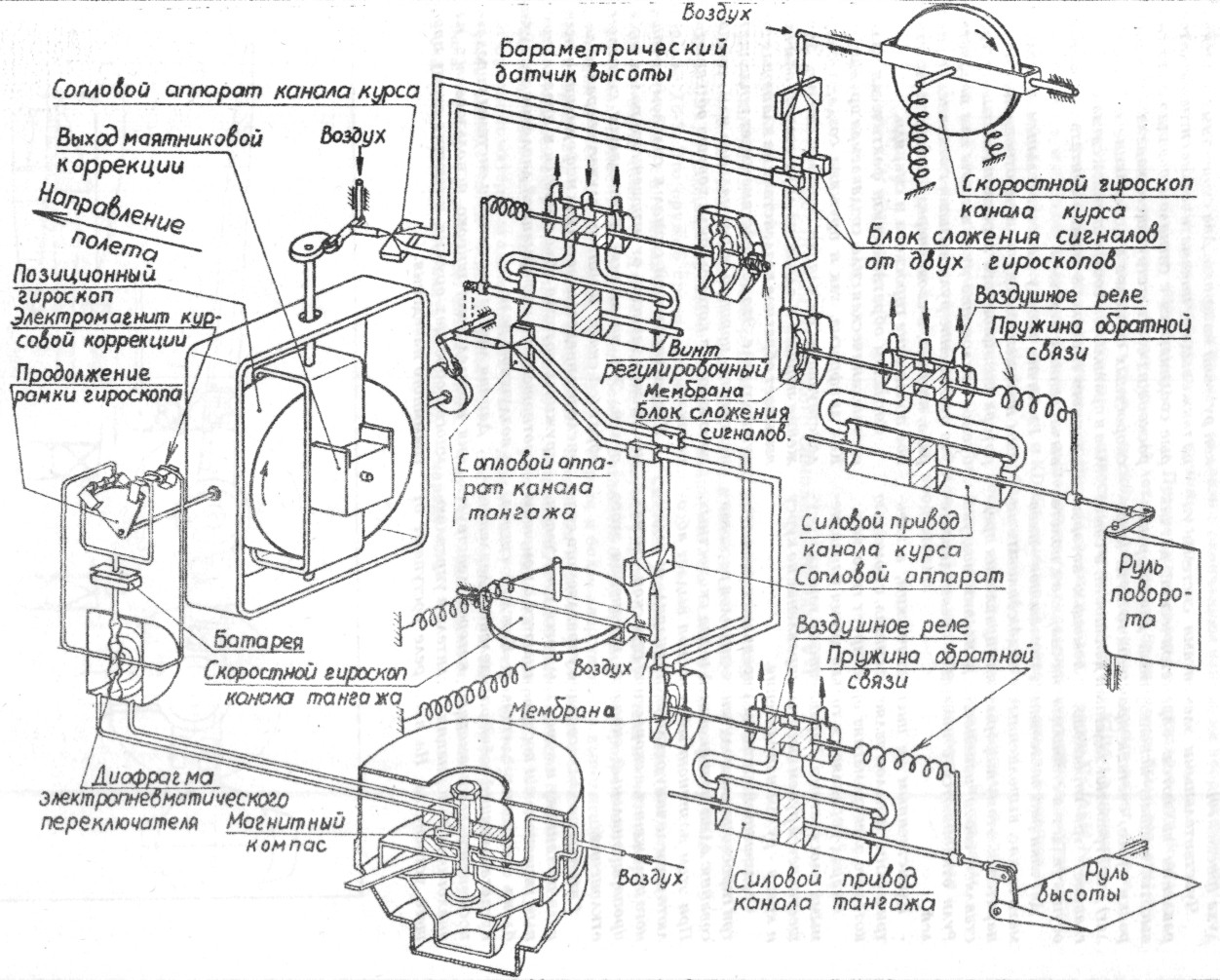
Рис.3.3.10. Схема пневматической системы управления самолетом-снарядом JB-2 (V-1).
Система управления снарядом JB-2 была выполнена пневматической: привод гироскопов, рулевых машинок и выработка сигналов управления осуществляются с помощью сжатого воздуха (рис. 3.3.10),
Чувствительными элементами системы управления являются: барометрический датчик высоты, компас, используемый для корректировки курса, счетчик пройденного пути (аэролаг) для отработки заданной дальности, а самое главное - три гироскопа, с помощью которых осуществляется стабилизация снаряда в полете.
Датчики рассогласования гироскопов - пневматические, выполненные в виде сопловых аппаратов, поэтому информация управления представляет собой изменения давления воздуха. Рули отклоняются с помощью пневмодвигателей.
Единственным не пневматическим, а электрическим сигналом является сигнал, с помощью которого электромагнит арретирует гироскоп.
Снаряд управляется только двумя управляемыми плоскостями. Управление по тангажу осуществляется рулем высоты; управление по курсу и крену - рулем направления.
Сердцевиной системы управления являются три гироскопа для получения сигналов рассогласования: один позиционный и два скоростных. При этом позиционный гироскоп выдает абсолютную величину отклонения снаряда от заданного положения, а скоростной гироскоп - сигнал, пропорциональный скорости изменения этого отклонения.
Сигналы рассогласования управляемого снаряда по тангажу и курсу выдаются трехстепенным гироскопом и воспринимаются с помощью блока воздушных датчиков. Каждый сигнал, представляющий собой определенное давление, посылается в пневмореле, которое действует аналогично комбинации усилителя и управляющего устройства. На вход реле поступают от блока воздушных датчиков небольшие изменения давления воздуха. На выходе пневмореле создает давление, достаточно высокое для того, чтобы воздействовать на поршень пневматической рулевой машинки. Два скоростных гироскопа также выдают пневматические сигналы, которые соединяются с сигналом позиционного гироскопа из соответствующего канала. Создание скоростных сигналов и добавление этих сигналов в правильном соотношении к сигналам позиционного гироскопа можно считать операцией вычисления в системе.
Различие между действительным и желаемым положением снаряда по отношению к оси ротора позиционного гироскопа вызывает требуемое отклонение руля высоты или поворота. Это отклонение руля вызывает отклонение снаряда, которое, в свою очередь, влияет на взаимное положение гироскопа и снаряда.
Сигналом обратной связи фактически является механическая сила, создаваемая пружиной. Как диафрагма, так и пружина создают силу, действующую на клапан сервомеханизма. Движение поршня к одной из двух сторон обычно вызывает обратное воздействие на клапаны воздушного реле. Это воздействие имеет тенденцию возвратить поршень в нормальное или среднее положение, в котором рули хорошо обтекаются потоком.
Корректирующий сигнал к силовому поршню должен зависеть от мгновенного положения рулей. Это положение указывается сигналом обратной связи. В данном случае операция вычисления представляется как информация о силе пружины, которая объединяется в правильном соотношении с информацией давления воздуха в воздушном реле.
Данная логика построения системы управления впоследствии широко использовалась на многих образцах оружия, имеющих схему программного наведения.
![]()
![]()
![]()