![]()
![]()
![]()
Система управления ЗУР «Вассерфаль»
Первоначально предполагалось, что «Вассерфаль» будет наводиться по лучу РЛС. При атом РЛС должна была сканировать цель, а ЗУР, с помощью бортовой системы управления - удерживаться в равносигнальной зоне вплоть до встречи с целью. Идея, безусловно, была прогрессивной, но такие системы в то время находились лишь на начальной стадии исследований. Поэтому была предложена радиокомандная система наведения с использованием двух РЛС, схема которой приведена на рис. 2.4.13. По этой схеме одна РЛС следила, за целью, а вторая отслеживала ЗУР. При этом обе отметки (от цели и от ракеты) выводились на одну электроннолучевую трубку. Оператор С помощью ручки управления на так называемом «кнюппеле» старался совместить на экране отметки от цели и ЗУР. Сигналы от «кнюппеля» посту вали в счетно-решающее устройство фирмы Сименс, где вырабатывались необходимые команды, которые через передатчик по радиоканалу передавались на ракету.
Общий вид наземной аппаратуры показан на рис. 2.4.14. Радиолокатор слежения за целью имеет параболическую антенну диаметром 7,4 м, а радиолокатор сопровождения ракеты - параболическую антенну диаметром 3,0 м. Система работала в дециметровом, диапазоне волн. Передатчик команд имел круговую поляризованную антенну, работающую в диапазоне УКВ.
На борту ракеты сигналы управления принимаются, дешифруются, усиливаются и передаются на рулевые машинки К-2 фирмы Сименс. Стабилизация ракеты по крену и гашение колебаний по остальным осям производит бортовой автопилот. Такая система наведения обеспечивала бы всепогодность применения комплекса «Вассерфаль».
Основная часть бортовой аппаратуры управления располагалась в хвостовом отсеке и закрывалась съемными лючками. Это упрощало предстартовое обслуживание и исключало применение высоких стремянок (в отличие от Фау-2, у которой аппаратура размещалась в носовой части ракеты).
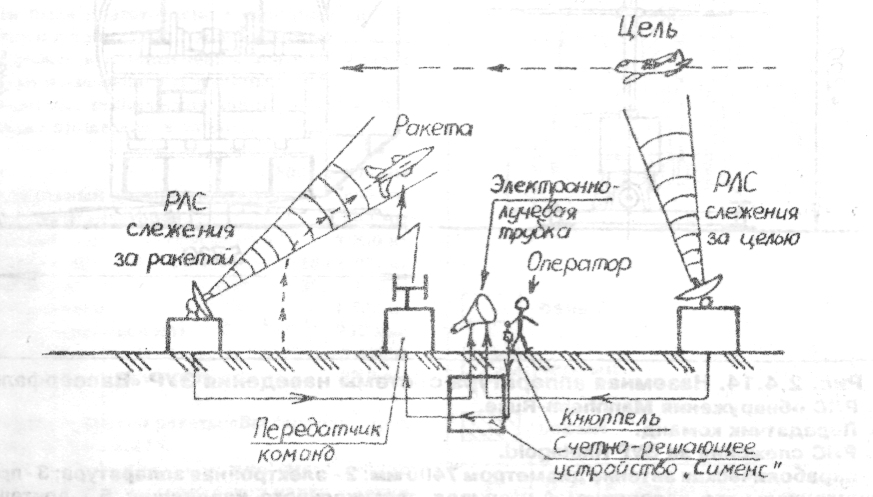
Рис. 2.4.13. Схема наведения ЗУР «Вассерфаль».
![]()
![]()
![]()